|
Image Component Library (ICL)
|
|
Image Component Library (ICL)
|
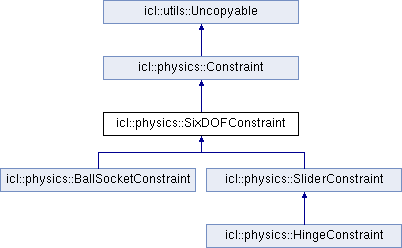
This is a generic constraint that allows to free configuration of the limits on all 6 degrees of freedom. More...
#include <SixDOFConstraint.h>
Public Member Functions | |
| SixDOFConstraint (RigidObject *a, RigidObject *b, const geom::Mat &frameInA, const geom::Mat &frameInB, const bool useLinearReferenceFrameA=true) | |
| The frames describe the position and orientation of the pivot in the objectspaces of the 2 objects. More... | |
| SixDOFConstraint (RigidObject *a, RigidObject *b, const geom::Vec &pivotInA, const geom::Vec &pivotInB, bool useLinearReferenceFrameA=true) | |
| SixDOFConstraint (RigidObject *a, RigidObject *b, const bool useLinearReferenceFrameA=true) | |
| This constructor uses the identity geom::Matrices as frames. More... | |
| void | setFrames (const geom::Mat &frameA, const geom::Mat &frameB) |
| The frames describe the position and orientation of the constraint pivot in the objectspace of the 2 objects. More... | |
| void | setPivot (const geom::Vec &pivotInA, const geom::Vec &pivotInB) |
| void | setLinearLowerLimit (const geom::Vec &lower) |
| void | setLinearUpperLimit (const geom::Vec &upper) |
| geom::Vec | getLinearLowerLimit () |
| Return the lower linear limit. More... | |
| geom::Vec | getLinearUpperLimit () |
| Return the upper linear limit. More... | |
| float | getAngle (int index) |
| void | setAngularLowerLimit (const geom::Vec &lower) |
| void | setAngularUpperLimit (const geom::Vec &upper) |
| geom::Vec | getAngularLowerLimit () |
| Return the lower angular limit. More... | |
| geom::Vec | getAngularUpperLimit () |
| Return the upper angular limit. More... | |
| void | setLinearMotor (int index, bool enableMotor, float targetVelocity, float maxMotorForce, bool force_activation=false) |
| Set the angular motor settings. More... | |
| void | setAngularMotor (int index, bool enableMotor, float targetVelocity, float maxMotorForce, bool force_activation=false) |
| Set the linear motor settings. More... | |
 Public Member Functions inherited from icl::physics::Constraint Public Member Functions inherited from icl::physics::Constraint | |
| Constraint () | |
| Base cosntructor. More... | |
| virtual | ~Constraint () |
| Destructor. More... | |
| btTypedConstraint * | getConstraint () |
| Getter for the internal constraint. More... | |
| std::vector< RigidObject * > & | getObjects () |
| Getter for the objects involved in the constraint. More... | |
Private Member Functions | |
| void | init (RigidObject *a, RigidObject *b, const geom::Mat &frameInA, const geom::Mat &frameInB, const bool useLinearReferenceFrameA) |
Additional Inherited Members | |
| Protected Member Functions inherited from icl::physics::Constraint | |
| void | initUserPointer () |
| Protected Member Functions inherited from icl::utils::Uncopyable | |
| Uncopyable () | |
| Empty base constructor. More... | |
| Protected Attributes inherited from icl::physics::Constraint | |
| btTypedConstraint * | m_constraint |
| internal constraint More... | |
| std::vector< RigidObject * > | m_objects |
| bool | m_collide |
This is a generic constraint that allows to free configuration of the limits on all 6 degrees of freedom.
| icl::physics::SixDOFConstraint::SixDOFConstraint | ( | RigidObject * | a, |
| RigidObject * | b, | ||
| const geom::Mat & | frameInA, | ||
| const geom::Mat & | frameInB, | ||
| const bool | useLinearReferenceFrameA = true |
||
| ) |
The frames describe the position and orientation of the pivot in the objectspaces of the 2 objects.
| icl::physics::SixDOFConstraint::SixDOFConstraint | ( | RigidObject * | a, |
| RigidObject * | b, | ||
| const geom::Vec & | pivotInA, | ||
| const geom::Vec & | pivotInB, | ||
| bool | useLinearReferenceFrameA = true |
||
| ) |
| icl::physics::SixDOFConstraint::SixDOFConstraint | ( | RigidObject * | a, |
| RigidObject * | b, | ||
| const bool | useLinearReferenceFrameA = true |
||
| ) |
This constructor uses the identity geom::Matrices as frames.
| float icl::physics::SixDOFConstraint::getAngle | ( | int | index | ) |
| geom::Vec icl::physics::SixDOFConstraint::getAngularLowerLimit | ( | ) |
Return the lower angular limit.
| geom::Vec icl::physics::SixDOFConstraint::getAngularUpperLimit | ( | ) |
Return the upper angular limit.
| geom::Vec icl::physics::SixDOFConstraint::getLinearLowerLimit | ( | ) |
Return the lower linear limit.
| geom::Vec icl::physics::SixDOFConstraint::getLinearUpperLimit | ( | ) |
Return the upper linear limit.
|
private |
| void icl::physics::SixDOFConstraint::setAngularLowerLimit | ( | const geom::Vec & | lower | ) |
| void icl::physics::SixDOFConstraint::setAngularMotor | ( | int | index, |
| bool | enableMotor, | ||
| float | targetVelocity, | ||
| float | maxMotorForce, | ||
| bool | force_activation = false |
||
| ) |
Set the linear motor settings.
| void icl::physics::SixDOFConstraint::setAngularUpperLimit | ( | const geom::Vec & | upper | ) |
| void icl::physics::SixDOFConstraint::setFrames | ( | const geom::Mat & | frameA, |
| const geom::Mat & | frameB | ||
| ) |
The frames describe the position and orientation of the constraint pivot in the objectspace of the 2 objects.
| void icl::physics::SixDOFConstraint::setLinearLowerLimit | ( | const geom::Vec & | lower | ) |
| void icl::physics::SixDOFConstraint::setLinearMotor | ( | int | index, |
| bool | enableMotor, | ||
| float | targetVelocity, | ||
| float | maxMotorForce, | ||
| bool | force_activation = false |
||
| ) |
Set the angular motor settings.
| void icl::physics::SixDOFConstraint::setLinearUpperLimit | ( | const geom::Vec & | upper | ) |
| void icl::physics::SixDOFConstraint::setPivot | ( | const geom::Vec & | pivotInA, |
| const geom::Vec & | pivotInB | ||
| ) |
 1.8.15
1.8.15