|
Image Component Library (ICL)
|
|
Image Component Library (ICL)
|
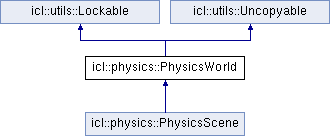
A physical world that handles physical objects. More...
#include <PhysicsWorld.h>
Public Types | |
| enum | BulletSolverType { SequentialImpulseConstraintSolver, MLCP_Dantzig, NNCG, Lemke, Default = SequentialImpulseConstraintSolver } |
Public Member Functions | |
| PhysicsWorld (BulletSolverType solver_type=Default) | |
| constructor with given config file name More... | |
| ~PhysicsWorld () | |
| Destructor. More... | |
| void | addObject (PhysicsObject *obj) |
| adds a physics object to the world (ownership is not passed) More... | |
| void | removeObject (PhysicsObject *obj) |
| removes the given physics object from the world More... | |
| void | setGravity (const geom::Vec &gravity) |
| sets the Gravity of the World More... | |
| void | setGravityEnabled (bool on, const geom::Vec *useThisGravityIfOn=0) |
| enables/disables gravity More... | |
| void | splitImpulseEnabled (bool enable) |
| enable splitImpulse More... | |
| void | step (float dtSeconds=-1, int maxSubSteps=10, float fixedTimeStep=1.f/120.f) |
| applies physical simulation for the given time step More... | |
| double | getLastTimeDelta () |
| returns the last delta of time in seconds as a double value. More... | |
| bool | collideWithWorld (RigidObject *obj, bool ignoreJoints=true) |
| check collision of an object with the world More... | |
| void | setGroupCollision (int group0, int group1, bool collides) |
| enables/disables collision between the group0 and group1 More... | |
| bool | getGroupCollision (int group0, int group1) |
| returns wether group0 and group1 collide More... | |
| bool | rayCast (const geom::ViewRay &ray, float rayLength, PhysicsObject *&obj, geom::Vec &normal, geom::Vec &hitPoint) |
| Return true if the ray hit and sets the pointer to the first object that was hit as well as the hit normal and hit point. More... | |
| void | addConstraint (Constraint *constraint, bool disableCollisionWithLinkedBodies=false, bool passOwnerShip=false) |
| adds a constraint to the world More... | |
| void | removeConstraint (Constraint *constraint) |
| removes a cosntraint from the world More... | |
| const btSoftBodyWorldInfo * | getWorldInfo () const |
| returns an internal world-info struct More... | |
| btSoftBodyWorldInfo * | getWorldInfo () |
| returns an internal world-info struct More... | |
 Public Member Functions inherited from icl::utils::Lockable Public Member Functions inherited from icl::utils::Lockable | |
| Lockable (bool recursive=false) | |
| Default constructor. More... | |
| Lockable (const Lockable &l) | |
| copy constructor (does not copy the source mutex) More... | |
| Lockable & | operator= (const Lockable &l) |
| assignment operator (does not copy the source mutex) More... | |
| ~Lockable () | |
| Destructor. More... | |
| void | lock () const |
| lock object More... | |
| void | unlock () const |
| unlock object More... | |
| Mutex & | getMutex () const |
| returns mutex of this object More... | |
Protected Member Functions | |
| void | removeContactPoints (PhysicsObject *obj) |
| removes contactpoints (used when the collisionshape of an object has changed) More... | |
| Protected Member Functions inherited from icl::utils::Uncopyable | |
| Uncopyable () | |
| Empty base constructor. More... | |
Private Member Functions | |
| void | setSolver (BulletSolverType type) |
Private Attributes | |
| Data * | data |
| internal data pointer More... | |
Friends | |
| class | PhysicsObject |
A physical world that handles physical objects.
| icl::physics::PhysicsWorld::PhysicsWorld | ( | BulletSolverType | solver_type = Default | ) |
constructor with given config file name
| icl::physics::PhysicsWorld::~PhysicsWorld | ( | ) |
Destructor.
| void icl::physics::PhysicsWorld::addConstraint | ( | Constraint * | constraint, |
| bool | disableCollisionWithLinkedBodies = false, |
||
| bool | passOwnerShip = false |
||
| ) |
adds a constraint to the world
| void icl::physics::PhysicsWorld::addObject | ( | PhysicsObject * | obj | ) |
adds a physics object to the world (ownership is not passed)
| bool icl::physics::PhysicsWorld::collideWithWorld | ( | RigidObject * | obj, |
| bool | ignoreJoints = true |
||
| ) |
check collision of an object with the world
| bool icl::physics::PhysicsWorld::getGroupCollision | ( | int | group0, |
| int | group1 | ||
| ) |
returns wether group0 and group1 collide
| double icl::physics::PhysicsWorld::getLastTimeDelta | ( | ) |
returns the last delta of time in seconds as a double value.
| const btSoftBodyWorldInfo* icl::physics::PhysicsWorld::getWorldInfo | ( | ) | const |
returns an internal world-info struct
| btSoftBodyWorldInfo* icl::physics::PhysicsWorld::getWorldInfo | ( | ) |
returns an internal world-info struct
| bool icl::physics::PhysicsWorld::rayCast | ( | const geom::ViewRay & | ray, |
| float | rayLength, | ||
| PhysicsObject *& | obj, | ||
| geom::Vec & | normal, | ||
| geom::Vec & | hitPoint | ||
| ) |
Return true if the ray hit and sets the pointer to the first object that was hit as well as the hit normal and hit point.
| void icl::physics::PhysicsWorld::removeConstraint | ( | Constraint * | constraint | ) |
removes a cosntraint from the world
|
protected |
removes contactpoints (used when the collisionshape of an object has changed)
| void icl::physics::PhysicsWorld::removeObject | ( | PhysicsObject * | obj | ) |
removes the given physics object from the world
| void icl::physics::PhysicsWorld::setGravity | ( | const geom::Vec & | gravity | ) |
sets the Gravity of the World
| void icl::physics::PhysicsWorld::setGravityEnabled | ( | bool | on, |
| const geom::Vec * | useThisGravityIfOn = 0 |
||
| ) |
enables/disables gravity
When enabling gravity (on = true), either the given gravity value can be used or if useThisGravityIfOn is null, the default gravity (0,0, -9810) is used
| void icl::physics::PhysicsWorld::setGroupCollision | ( | int | group0, |
| int | group1, | ||
| bool | collides | ||
| ) |
enables/disables collision between the group0 and group1
|
private |
| void icl::physics::PhysicsWorld::splitImpulseEnabled | ( | bool | enable | ) |
enable splitImpulse
| void icl::physics::PhysicsWorld::step | ( | float | dtSeconds = -1, |
| int | maxSubSteps = 10, |
||
| float | fixedTimeStep = 1.f/120.f |
||
| ) |
applies physical simulation for the given time step
If the given time interval tdSeconds is < 0, the actual time interval since the last call of this method is used
|
friend |
|
private |
internal data pointer
 1.8.15
1.8.15